(视觉人机器视觉培训)康耐视3DA5000标定详细流程(相机安装于机器人上)
创始人
2025-05-30 12:52:05
0次
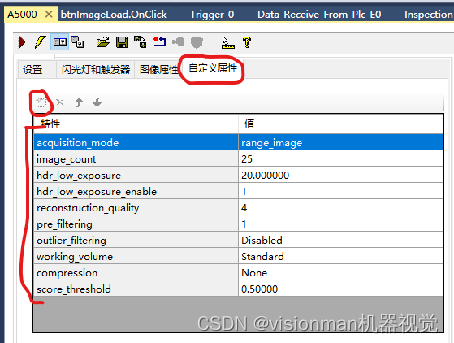
1、打开,运行A5000Viewer

2、修改相应参数,确认图像效果,并在Fifo取像工具自定义属性中添加。
1、本次应用为相机安装在机器人六轴前段,标定块位于相机视野内静止不动,对于相机固定安装稍有差异。
2、机器人带着相机以拍照位为中心,包括拍照位,选择6个拍照位置,保证相机都能看到标定块,且机器人的6个位置姿态都不重复,此时在每个拍照位置时,图片保存至同一个cdb文件中,最终cdb文件中共计6张图片。
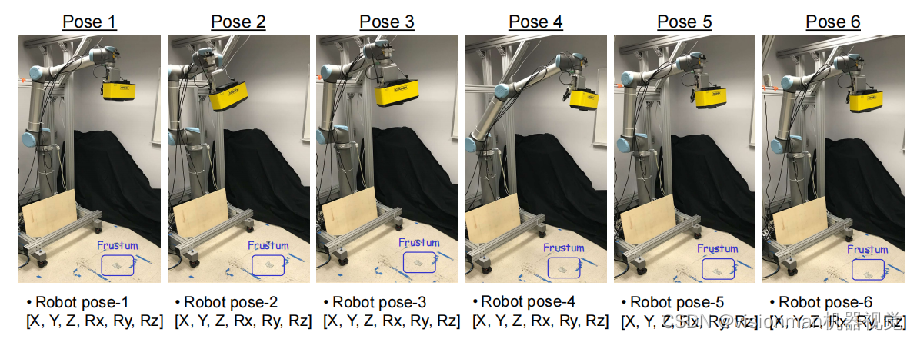
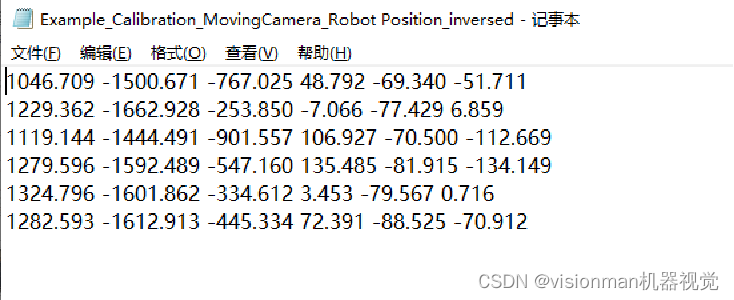
3、机器人的6个拍照位置的数据(X、Y、Z、RX、RY、RZ)放入到向量运算EXCEL表格中,进行向量运算。

4、向量运算后的6组值复制到txt文本中,数据之间保持单个空格。
5、双击打开标定工具软件,点击“Create new calibration”。
相关内容
热门资讯
徐福记驰援广西洪涝灾区,300...
近日,受台风及持续强降雨影响,广西多地发生严重洪涝灾害,南宁、贵港等地区部分乡镇受灾严重,数万群众被...
【品牌风采】“移动诊室”进社区...
红医暖心义诊,守护百姓安康。在“7·11世界人口日”来临之际,长春市中医院积极响应相关部门邀请,由平...
全国首个,华山医院牵头制定的医...
2026年7月10日,“医院关爱文化及员工支持体系规范化建设”继续教育学习班暨第十届中国医院员工关爱...
多彩夏日 快乐假期 中小学生暑...
孩子们在气化街社区的图书室内阅读 进入7月,中小学生迎来暑假。如何让孩子度过一个充实、快乐且有意义的...
荆门铁警多举措筑牢暑运线路安全...
进入暑运安保关键阶段,襄阳铁路公安处荆门站派出所紧扣夏季线路治安防控、汛期防洪防汛工作要求,统筹警力...
近期涉私家车群死群伤事故多发,...
7月9日,微信公众号“公安部交通管理局”发文《近期涉私家车群死群伤事故多发 公安部交管局提示:全家出...
伊朗回应“希望与美国谈判”
据央视新闻消息,伊朗外交部发言人巴加埃10日表示, 伊朗从未提出过与美国谈判的诉求,但同意调解方访问...
美国眼中的欧洲有多“糟”?北约...
中新网7月10日电 (记者 甘甜)短短两天北约峰会进程里,美国总统特朗普毫不避讳,把对北约盟友的不满...
“巴威”,再度增强为强台风级
央视新闻消息,今年第九号台风“巴威”今天零时再度增强为强台风级,今早6点,“巴威”的中心位于距离浙闽...
消息人士:美伊新一轮谈判或于下...
新华社华盛顿7月10日电 据美国媒体10日援引消息人士的话报道称,美国和伊朗新一轮谈判或于下周在瑞士...