VSCode配置之OnnxRuntime(CPU)极简配置 VS2022 OnnxRuntime(CPU)验证
创始人
2025-05-31 13:53:10
0次
- 背景
最近在尝试将Pytorch模型部署为Cmodel并讨论推理框架的速度优势,作为VSCode配置之LibTorch(GPU)极简配置 & VS2022 LibTorch(GPU)验证的姊妹篇,本篇将基于VSCode和VS2022环境进行OnnxRuntime环境的配置和验证。(注:为快速验证,这里仅配置了CPU推理,目前了解的情况是,OnnxRuntime在CPU推理上的加速比较友好,TensorRT在GPU环境加速比较友好,具体可能跟模型、实测结果有关,后续可能会进一步补充验证) - 软件环境
OnnxRuntime 1.14.1 版本(可选的)
VSCode+CMake
VS Studio 2022
参考代码:参考代码:yolov7-opencv-onnxrun-cpp-py - VSCode + OnnxRuntime CPU版本配置
1)测试代码 (整体结构参考之前的推理框架)
#include
#include
#include
#include
#include
//#include
#include using namespace std;
using namespace cv;
using namespace Ort;struct Net_config
{float confThreshold; // Confidence thresholdfloat nmsThreshold; // Non-maximum suppression thresholdstring modelpath;
};typedef struct BoxInfo
{float x1;float y1;float x2;float y2;float score;int label;
} BoxInfo;class YOLOV7
{
public:YOLOV7(Net_config config);void detect(Mat& frame);
private:int inpWidth;int inpHeight;int nout;int num_proposal;vector class_names;int num_class;float confThreshold;float nmsThreshold;vector input_image_;void normalize_(Mat img);void nms(vector& input_boxes);Env env = Env(ORT_LOGGING_LEVEL_ERROR, "YOLOV7");Ort::Session* ort_session = nullptr;SessionOptions sessionOptions = SessionOptions();vector input_names = {"images"};vector output_names = {"output"};vector> input_node_dims; // >=1 outputsvector> output_node_dims; // >=1 outputs
};YOLOV7::YOLOV7(Net_config config)
{this->confThreshold = config.confThreshold;this->nmsThreshold = config.nmsThreshold;string classesFile = "coco.names";string model_path = config.modelpath;std::wstring widestr = std::wstring(model_path.begin(), model_path.end());//OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(sessionOptions, 0);//sessionOptions.SetGraphOptimizationLevel(ORT_ENABLE_BASIC);ort_session = new Session(env, widestr.c_str(), sessionOptions);size_t numInputNodes = ort_session->GetInputCount();size_t numOutputNodes = ort_session->GetOutputCount();AllocatorWithDefaultOptions allocator;for (int i = 0; i < numInputNodes; i++){// input_names.push_back((ort_session->GetInputNameAllocated(i, allocator)).get());Ort::TypeInfo input_type_info = ort_session->GetInputTypeInfo(i);auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();auto input_dims = input_tensor_info.GetShape();input_node_dims.push_back(input_dims);}for (int i = 0; i < numOutputNodes; i++){// output_names.push_back(ort_session->GetOutputNameAllocated(i, allocator).get());Ort::TypeInfo output_type_info = ort_session->GetOutputTypeInfo(i);auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();auto output_dims = output_tensor_info.GetShape();output_node_dims.push_back(output_dims);}this->inpHeight = input_node_dims[0][2];this->inpWidth = input_node_dims[0][3];this->nout = output_node_dims[0][2];this->num_proposal = output_node_dims[0][1];ifstream ifs(classesFile.c_str());string line;while (getline(ifs, line)) this->class_names.push_back(line);this->num_class = class_names.size();
}void YOLOV7::normalize_(Mat img)
{// img.convertTo(img, CV_32F);int row = img.rows;int col = img.cols;this->input_image_.resize(row * col * img.channels());for (int c = 0; c < 3; c++){for (int i = 0; i < row; i++){for (int j = 0; j < col; j++){float pix = img.ptr(i)[j * 3 + 2 - c];this->input_image_[c * row * col + i * col + j] = pix / 255.0;}}}
}void YOLOV7::nms(vector& input_boxes)
{sort(input_boxes.begin(), input_boxes.end(), [](BoxInfo a, BoxInfo b) { return a.score > b.score; });vector vArea(input_boxes.size());for (int i = 0; i < int(input_boxes.size()); ++i){vArea[i] = (input_boxes.at(i).x2 - input_boxes.at(i).x1 + 1)* (input_boxes.at(i).y2 - input_boxes.at(i).y1 + 1);}vector isSuppressed(input_boxes.size(), false);for (int i = 0; i < int(input_boxes.size()); ++i){if (isSuppressed[i]) { continue; }for (int j = i + 1; j < int(input_boxes.size()); ++j){if (isSuppressed[j]) { continue; }float xx1 = (max)(input_boxes[i].x1, input_boxes[j].x1);float yy1 = (max)(input_boxes[i].y1, input_boxes[j].y1);float xx2 = (min)(input_boxes[i].x2, input_boxes[j].x2);float yy2 = (min)(input_boxes[i].y2, input_boxes[j].y2);float w = (max)(float(0), xx2 - xx1 + 1);float h = (max)(float(0), yy2 - yy1 + 1);float inter = w * h;float ovr = inter / (vArea[i] + vArea[j] - inter);if (ovr >= this->nmsThreshold){isSuppressed[j] = true;}}}// return post_nms;int idx_t = 0;input_boxes.erase(remove_if(input_boxes.begin(), input_boxes.end(), [&idx_t, &isSuppressed](const BoxInfo& f) { return isSuppressed[idx_t++]; }), input_boxes.end());
}void YOLOV7::detect(Mat& frame)
{Mat dstimg;resize(frame, dstimg, Size(this->inpWidth, this->inpHeight));this->normalize_(dstimg);array input_shape_{ 1, 3, this->inpHeight, this->inpWidth };auto allocator_info = MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU);Value input_tensor_ = Value::CreateTensor(allocator_info, input_image_.data(), input_image_.size(), input_shape_.data(), input_shape_.size());// 开始推理vector ort_outputs = ort_session->Run(RunOptions{ nullptr }, &input_names[0], &input_tensor_, 1, output_names.data(), output_names.size()); // 开始推理/generate proposalsvector generate_boxes;float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;int n = 0, k = 0; ///cx,cy,w,h,box_score, class_scoreconst float* pdata = ort_outputs[0].GetTensorMutableData();for (n = 0; n < this->num_proposal; n++) ///特征图尺度{float box_score = pdata[4];if (box_score > this->confThreshold){int max_ind = 0;float max_class_socre = 0;for (k = 0; k < num_class; k++){if (pdata[k + 5] > max_class_socre){max_class_socre = pdata[k + 5];max_ind = k;}}max_class_socre *= box_score;if (max_class_socre > this->confThreshold){float cx = pdata[0] * ratiow; ///cxfloat cy = pdata[1] * ratioh; ///cyfloat w = pdata[2] * ratiow; ///wfloat h = pdata[3] * ratioh; ///hfloat xmin = cx - 0.5 * w;float ymin = cy - 0.5 * h;float xmax = cx + 0.5 * w;float ymax = cy + 0.5 * h;generate_boxes.push_back(BoxInfo{ xmin, ymin, xmax, ymax, max_class_socre, max_ind });}}pdata += nout;}// Perform non maximum suppression to eliminate redundant overlapping boxes with// lower confidencesnms(generate_boxes);for (size_t i = 0; i < generate_boxes.size(); ++i){int xmin = int(generate_boxes[i].x1);int ymin = int(generate_boxes[i].y1);rectangle(frame, Point(xmin, ymin), Point(int(generate_boxes[i].x2), int(generate_boxes[i].y2)), Scalar(0, 0, 255), 2);string label = format("%.2f", generate_boxes[i].score);label = this->class_names[generate_boxes[i].label] + ":" + label;putText(frame, label, Point(xmin, ymin - 5), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);}
}int main()
{Net_config YOLOV7_nets = { 0.3, 0.5, "model/yolov7_640x640.onnx" }; YOLOV7 net(YOLOV7_nets);string imgpath = "inference/bus.jpg";Mat srcimg = imread(imgpath);net.detect(srcimg);static const string kWinName = "Deep learning object detection in ONNXRuntime";namedWindow(kWinName, WINDOW_NORMAL);imshow(kWinName, srcimg);waitKey(0);destroyAllWindows();
}
2)CMakeLists.txt (编译方法参见另一篇博客[VSCode配置之Opencv4x终极奥义](https://blog.csdn.net/qq_37172182/article/details/121933824?spm=1001.2014.3001.5502))
# cmake needs this line
SET(CMAKE_BUILD_TYPE "Release")
# # Define project name
# PROJECT(CppTemplate)include_directories("D:/path/to/your/opencv/build/include" "D:/path/to/your/opencv/build/include/opencv2")
include_directories("D:/path/to/your/Microsoft.ML.OnnxRuntime.1.14.1/build/native/include")#指定dll的lib所在路径
link_directories("D:/path/to/your/opencv/build/x64/vc15/lib")
link_directories("D:/path/to/your/Microsoft.ML.OnnxRuntime.1.14.1/runtimes/win-x64/native")include_directories(OpenCV_INCLUDE_DIRS)
set(CMAKE_PREFIX_PATH D:/libtorch_gpu/libtorch/share/cmake/Torch/)
find_package( Torch REQUIRED)add_executable(onnxruntime_yolov7 onnxruntime_yolov7.cpp)
target_link_libraries(onnxruntime_yolov7 opencv_world460 onnxruntime)。
3)输出结果

-
VS2022 OnnxRuntime版本配置
1)快速配置方法:项目 -> 管理NuGet程序包,即可快速安装OnnxRuntime(见下图)
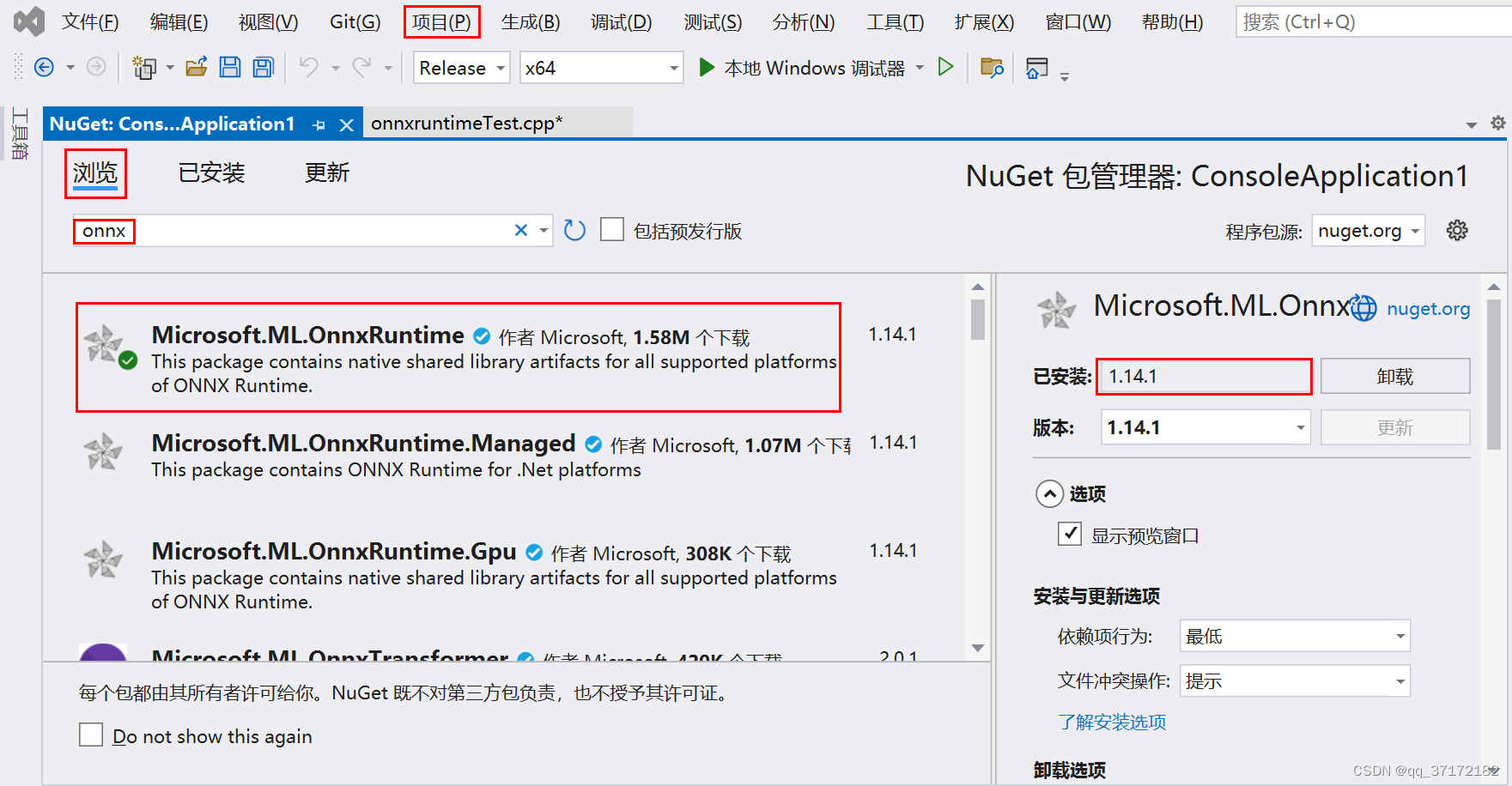
【注:之所以在开头说OnnxRuntime的安装是可选的,是因为这里会自动下载一份OnnxRuntime在项目目录的package里面,VSCode通过配置CMakeFiles.txt获取相应路径即可】
2)输出结果

-
小结
可能存在的问题:
1. OpenCV4.5.x调用.onnx文件forward失败;解决方案:1) 修改yolov7源码:model/common.py#52 return torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1)def forward(self, x): return Contract(gain=2).(x)2) 导出命令(不含nms和grid):python export.py --weights ./yolov7.pt --img-size 640 640- 运行过程报错异常;
ort_session->GetInputName(i, allocator) ort_session->GetOutputName(i, allocator) 修改为: ort_session->GetInputNameAllocated(i, allocator)).get() ort_session->GetOutputNameAllocated(i, allocator)).get() 仍然存在内存泄漏的风险,最直接的解决方案是使用Netron查看.onnx模型的输入和输出- 推理时间评估;
需要进一步深入了解Onnxruntime的加速设置方法、快速读取模型等流程,最终考虑将LibTorch、OpenCV、OnnxRuntime、TensorRT各种平台做综合对比。
相关内容
热门资讯
中国燃油车在海外大火?国产燃油...
长期以来,国产燃油车都是非常特殊的存在,受到中国汽车工业起步较晚的影响,国产燃油车在全球市场上的影响...
朗信电气:控股股东及同一控制下...
《金证研》北方资本中心 亦戈/作者 廉贞 映蔚/风控2025年12月13日,江苏朗信电气股份有限公司...
“地产西南王”换血重生:历时两...
12月16日早间,ST金科股票开盘即封涨停,收报1.55元。就在12月15日晚,金科股份发布《关于公...
特朗普大战BBC,英国人急坏了...
特朗普终于出手了,正式诉讼BBC,索赔金额100亿美元。我看到,路透社就感叹:这是英国广播公司(BB...
年底清账!安徽建工新增14起案...
因多笔工程款项被拖欠,安徽建工(SH600502,股价4.64元,市值80亿元)及其子公司正通过法律...
哈塞特:美联储独立性非常重要,...
周二,美联储主席职位的大热候选人之一、国家经济委员会主任凯文·哈塞特(Kevin Hassett)表...
扫地机器人鼻祖iRobot黯然...
过去两周被当做"机器人概念股"热炒的iRobot公司,宣布提交破产保护申请。公司同时宣布重组协议,将...
Waymo据称洽谈新融资,估值...
新近消息显示,特斯拉的无人驾驶领域劲敌Waymo正在以约千亿美元的估值寻求新的融资。据美东时间16日...
派拉蒙1080亿报价截胡奈飞失...
一场将决定好莱坞未来的收购战可能以奈飞胜出告终,因为最新消息称,华纳兄弟探索公司(Warner Br...
法拍房未披露曾发生非正常死亡事...
2023年6月,郭某、贝某以4821万余元竞拍到位于广东省深圳市的案涉房屋。但是,案涉房屋的拍卖公告...